
 Python Tutorials Python Tutorials | (back to the list of tutorials) |
 Line Agent on A Surface
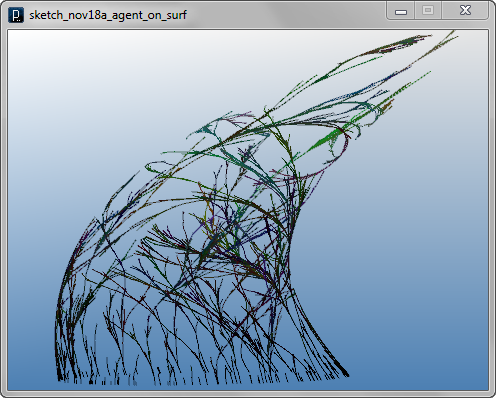
Line Agent on A SurfaceThe example below shows how to re-write the line branching agents shown before (without collision detection) to have them on a surface.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(120)
IG.open("surface13.3dm")
srf = IG.surface(0) #first surface in the server
srf.del()
for i in range(120) :
LineAgentOnSurface(IVec(IRand.get(),0,0),\ #random only in x
IVec(0,0.01,0),\ #direction is y. length is less than 1.0
srf).clr(0)
class LineAgentOnSurface(IAgent) :
def __init__(self, pt, dir, s) :
self.pos = pt
self.dir = dir
self.surf = s
def update(self) :
if self.pos.x() < 0 or self.pos.x() > 1.0 : #out of u-v boundary
self.del()
return
pos2 = self.pos.dup().add(self.dir)
srfPt = self.surf.pt(self.pos.x(), self.pos.y())
srfPt2 = self.surf.pt(pos2.x(), pos2.y())
ICurve(srfPt, srfPt2).clr(self.clr())
for i in range(2) :
if IRand.pct(50) :
dir2 = self.dir.dup()
angle = IRand.get(-PI/20, PI/20)
dir2.rot(IVec(0, 0, 1), angle)
r = self.clr().getRed() + IRand.getInt(-10, 10)
g = self.clr().getGreen() + IRand.getInt(-10, 10)
b = self.clr().getBlue() + IRand.getInt(-10, 10)
LineAgentOnSurface(pos2, dir2, self.surf).clr(r,g,b)
self.del()
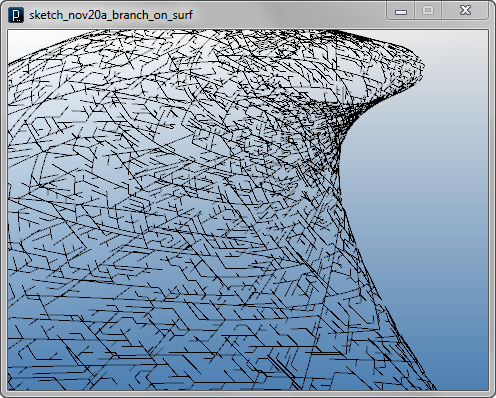
The below is the input surface to put the agents on. The file of the surface used in this example is this file.
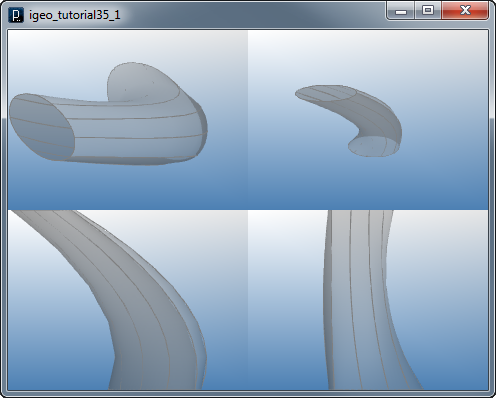
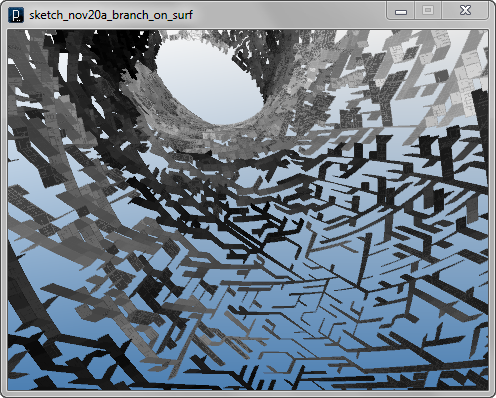
This is the result of the agents running on the input surface.
at the line of
if(pos.x < 0 || pos.x > 1.0){
it checks if the x position of the agent is inside the boundary of
u-v parameter of the surface ( 0.0 - 1.0 ) and if it's outside, it deletes itself.
Then at these two lines,
IVec srfPt = surf.pt(pos.x, pos.y);
IVec srfPt2 = surf.pt(pos2.x, pos2.y);
The position of the agent is interpreted as u-v parameter of the surface and
mapped onto the 3 dimensional location (IVec) on the surface.
Another thing to be noted is that in the setup() method at the constructor
of LineAgentOnSurface class,
new LineAgentOnSurface(new IVec(IRandom.get(),0,0),
new IVec(0,0.01,0),
srf)
the first argument is a vector variable to specify the starting
location of the agent and it's set to be bottom of v direction on the surface.
The second argument is another vector variable to specify the direction and the
length of the line and the length is set to be smaller than 1.0
because the full range of the v parameter on the surface is 1.0.
And at the third argument, it passes the base surface into the agent.

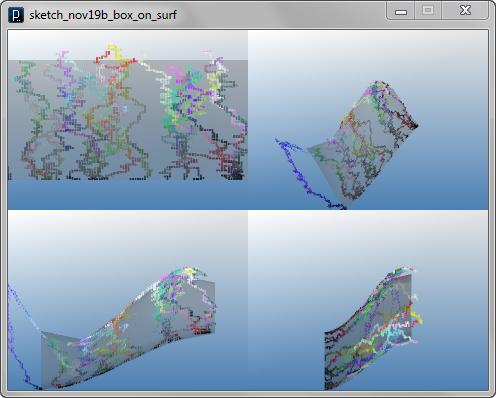
Box Agent on A SurfaceThe input surface used in the code is this file.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(300)
IG.open("surface1.3dm")
srf = IG.surface(0) #first surface in the server
for i in range(20) :
MyAgent(IVec(IRand.get(),0,0),0.5,srf).clr(0)
IG.transparent() #transparent graphic mode
class MyAgent(IAgent) :
def __init__(self, pt, sz, s) :
self.pos = pt
self.size = sz
self.surf = s
def update(self) :
surfPt = self.surf.pt(self.pos.x(), self.pos.y())
IBox(surfPt, self.size).clr(self.clr())
nextPos = self.pos.dup()
move = 0.01 #less than 1.0
#random direction
dir = IRand.getInt(0, 2)
if dir==0 :
nextPos.add(move, 0, 0) #right
elif dir==1 :
nextPos.add(-move, 0, 0) #left
elif dir==2 :
nextPos.add(0, move, 0) #up
# slightly chaning the color
r = self.clr().getRed() + IRand.getInt(-10, 10)
g = self.clr().getGreen() + IRand.getInt(-10, 10)
b = self.clr().getBlue() + IRand.getInt(-10, 10)
MyAgent(nextPos, self.size, self.surf).clr(r,g,b)
self.del()
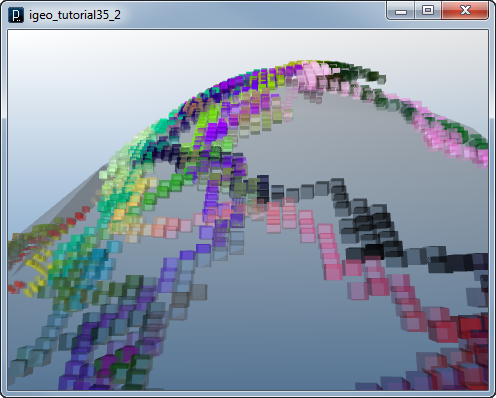
Mapping Agents with U, V Tangent and Normal![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(300)
IG.open("surface1.3dm")
surf = IG.surface(0)
for i in range(20) :
MyAgent(IVec(IRand.get(),0,0),0.01,surf).clr(0)
IG.transparent() #transparent graphic mode
class MyAgent(IAgent) :
def __init__(self, pt, sz, s) :
self.pos = pt
self.size = sz
self.surf = s
def update(self) :
utan = self.surf.utan(self.pos.x(), self.pos.y())
vtan = self.surf.vtan(self.pos.x(), self.pos.y())
nml = self.surf.nml(self.pos.x(), self.pos.y())
surfPt = self.surf.pt(self.pos.x(), self.pos.y())
utan.mul(self.size) #original length of u tangent vector is almost full width of surface in u.
vtan.mul(self.size) #original length of v tangent vector is almost full height of surface in v.
nml.mul(self.size*self.size) #original length of normal vector is multiplication of u tangent and v tangent
IBox(surfPt,utan,vtan,nml).clr(self.clr())
nextPos = self.pos.dup()
#random direction
dir = IRand.getInt(0, 2)
if dir==0 :
nextPos.add(self.size, 0, 0) #right
elif dir==1 :
nextPos.add(-self.size, 0, 0) #left
elif dir==2 :
nextPos.add(0, self.size, 0) #up
# slightly chaning the color
r = self.clr().getRed() + IRand.getInt(-10, 10)
g = self.clr().getGreen() + IRand.getInt(-10, 10)
b = self.clr().getBlue() + IRand.getInt(-10, 10)
MyAgent(nextPos, self.size, self.surf).clr(r, g, b)
self.del()

Another Example of Mapping Agent on A Surface![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
IG.open("surface13.3dm")
surf = IG.surface(0)
surf.del()
LineAgent(IVec(0,0,0), IVec(1,0,0),surf)
class LineAgent(IAgent) :
length = 0.01 #length in u-v space, less than 1.0
clearance = 0.0099 #less than length
def __init__(self, pt, dir, s) :
self.pt1 = pt
self.pt2 = pt.dup().add(dir.dup().len(LineAgent.length))
self.surf = s
self.isColliding = False
def interact(self, agents) :
if self.time() == 0 : #only in the first time
for agent in agents :
if isinstance(agent, LineAgent) :
if agent is not self :
# checking clearance of end point
if agent.pt2.dist(self.pt2) < LineAgent.clearance :
self.isColliding=True
def update(self) :
# is inside surface?
if self.pt2.x() < 0.0 or self.pt2.x() > 1.0 or \
self.pt2.y() < 0.0 or self.pt2.y() > 1.0 :
self.isColliding = True
if self.isColliding :
self.del()
elif self.time() == 0 : #if not colliding
surfPt1 = self.surf.pt(self.pt1.x(), self.pt1.y())
surfPt2 = self.surf.pt(self.pt2.x(), self.pt2.y())
ICurve(surfPt1,surfPt2).clr(0)
dir = self.pt2.dif(self.pt1)
if IRand.pct(40) : #bend
LineAgent(self.pt2,dir.dup().rot(PI/3),self.surf)
if IRand.pct(40) : #bend the other way
LineAgent(self.pt2,dir.dup().rot(-PI/3),self.surf)
if IRand.pct(80) : #straight
LineAgent(self.pt2,dir.dup(),self.surf)

The code below creates a fin surface instead of line. It gets offset points on the surface in a specified depth to get two more points out of the two end points of the line. Additionally, color differentiation algorithm in gray scale is also inserted.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
IG.open("surface13.3dm")
surf = IG.surface(0)
surf.del()
LineAgent(IVec(0,0,0), IVec(1,0,0),surf).clr(0.2)
class LineAgent(IAgent) :
length = 0.01 #length in u-v space, less than 1.0
clearance = 0.0099 #less than length
def __init__(self, pt, dir, s) :
self.pt1 = pt
self.pt2 = pt.dup().add(dir.dup().len(LineAgent.length))
self.surf = s
self.isColliding = False
def interact(self, agents) :
if self.time() == 0 : #only in the first time
for agent in agents :
if isinstance(agent, LineAgent) :
if agent is not self :
# checking clearance of end point
if agent.pt2.dist(self.pt2) < LineAgent.clearance :
self.isColliding=True
def update(self) :
# is inside surface?
if self.pt2.x() < 0.0 or self.pt2.x() > 1.0 or \
self.pt2.y() < 0.0 or self.pt2.y() > 1.0 :
self.isColliding = True
if self.isColliding :
self.del()
elif self.time() == 0 : #if not colliding
surfPt1 = self.surf.pt(self.pt1.x(), self.pt1.y())
surfPt2 = self.surf.pt(self.pt2.x(), self.pt2.y())
offsetDepth = 1
surfPt1d = self.surf.pt(self.pt1.x(), self.pt1.y(), offsetDepth)
surfPt2d = self.surf.pt(self.pt2.x(), self.pt2.y(), offsetDepth)
ISurface(surfPt1,surfPt2,surfPt2d,surfPt1d).clr(self.clr())
# slightly chaning the gray color
gray = (self.clr().getRed()+self.clr().getGreen()+self.clr().getBlue())/3
gray += IRand.getInt(-10, 10)
dir = self.pt2.dif(self.pt1)
if IRand.pct(40) : #bend
LineAgent(self.pt2,dir.dup().rot(PI/3),self.surf).clr(gray)
if IRand.pct(40) : #bend the other way
LineAgent(self.pt2,dir.dup().rot(-PI/3),self.surf).clr(gray)
if IRand.pct(80) : #straight
LineAgent(self.pt2,dir.dup(),self.surf).clr(gray)

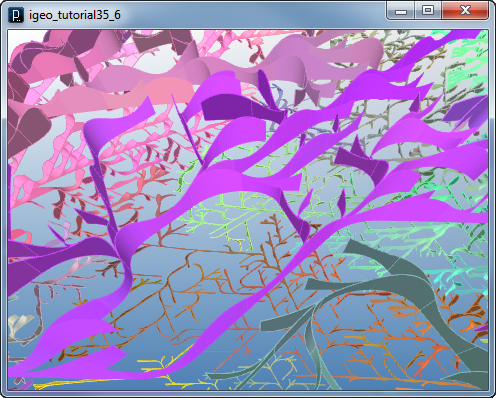
The code below combines the code above and the geometric technique to put continous curvature keeping the same tangency shown in this section. The surface is created taking 3 by 2 control points and 3 of them are midpoint of the current agent, end point of the current agent and midpoint of the next agent. Other 3 are offset points of those 3 points on the surface. Additionally, the offset depth of the second control point of the first 3 points is controlled by the agent too. It alternates the value making it smaller or larger than the offset depth of the end points.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
IG.open("surface13.3dm")
surf = IG.surface(0)
surf.del()
LineAgent(IVec(0,0,0), IVec(1,0,0),surf,0.5,0.1).clr(0.5)
class LineAgent(IAgent) :
length = 0.01 #length in u-v space, less than 1.0
clearance = 0.0099 #less than length
def __init__(self, pt, dir, s, depth1, depth2) :
self.pt1 = pt
self.pt2 = pt.dup().add(dir.dup().len(LineAgent.length))
self.surf = s
self.isColliding = False
self.offsetDepth1 = depth1
self.offsetDepth2 = depth2
def interact(self, agents) :
if self.time() == 0 : #only in the first time
for agent in agents :
if isinstance(agent, LineAgent) :
if agent is not self :
# checking clearance of end point
if agent.pt2.dist(self.pt2) < LineAgent.clearance :
self.isColliding=True
def update(self) :
# is inside surface?
if self.pt2.x() < 0.0 or self.pt2.x() > 1.0 or \
self.pt2.y() < 0.0 or self.pt2.y() > 1.0 :
self.isColliding = True
if self.isColliding :
self.del()
elif self.time() == 0 : #if not colliding
#midpoint of the current agent
mid = self.pt1.mid(self.pt2)
surfPt1 = self.surf.pt(mid.x(), mid.y())
surfPt1d = self.surf.pt(mid.x(), mid.y(), self.offsetDepth1)
#end point of the current agent
surfPt2 = self.surf.pt(self.pt2.x(), self.pt2.y())
surfPt2d = self.surf.pt(self.pt2.x(), self.pt2.y(), self.offsetDepth2)
nextDepth = 0
#alternating offsetDepth2
if self.offsetDepth2 > self.offsetDepth1 :
nextDepth = self.offsetDepth1-(self.offsetDepth2-self.offsetDepth1)
else :
nextDepth = self.offsetDepth1+(self.offsetDepth1-self.offsetDepth2)
# slightly chaning the color
r = self.clr().getRed() + IRand.getInt(-10, 10)
g = self.clr().getGreen() + IRand.getInt(-10, 10)
b = self.clr().getBlue() + IRand.getInt(-10, 10)
dir = self.pt2.dif(self.pt1)
if IRand.pct(40) : #bend
nextDir = dir.dup().rot(PI/3)
#midpoint of the next agent
mid2 = self.pt2.cp(nextDir.dup().len(LineAgent.length/2))
surfPt3 = self.surf.pt(mid2.x(),mid2.y())
surfPt3d = self.surf.pt(mid2.x(),mid2.y(),self.offsetDepth1)
#3 by 2 control points
cpts = [ [surfPt1, surfPt1d],\
[surfPt2, surfPt2d],\
[surfPt3, surfPt3d] ]
#u degree 2, v degree 1 surface
ISurface(cpts, 2, 1).clr(self.clr())
LineAgent(self.pt2,nextDir,self.surf,self.offsetDepth1,nextDepth).clr(r,g,b)
if IRand.pct(40) : #bend the other way
nextDir = dir.dup().rot(-PI/3)
#midpoint of the next agent
mid2 = self.pt2.cp(nextDir.dup().len(LineAgent.length/2))
surfPt3 = self.surf.pt(mid2.x(),mid2.y())
surfPt3d = self.surf.pt(mid2.x(),mid2.y(),self.offsetDepth1)
#3 by 2 control points
cpts = [ [surfPt1, surfPt1d],\
[surfPt2, surfPt2d],\
[surfPt3, surfPt3d] ]
#u degree 2, v degree 1 surface
ISurface(cpts, 2, 1).clr(self.clr())
LineAgent(self.pt2,nextDir,self.surf,self.offsetDepth1,nextDepth).clr(r,g,b)
if IRand.pct(80) : #straight
nextDir = dir
#midpoint of the next agent
mid2 = self.pt2.cp(nextDir.dup().len(LineAgent.length/2))
surfPt3 = self.surf.pt(mid2.x(),mid2.y())
surfPt3d = self.surf.pt(mid2.x(),mid2.y(),self.offsetDepth1)
cpts = [ [surfPt1, surfPt1d],\
[surfPt2, surfPt2d],\
[surfPt3, surfPt3d] ]
#u degree 2, v degree 1 surface
ISurface(cpts, 2, 1).clr(self.clr())
LineAgent(self.pt2,nextDir,self.surf,self.offsetDepth1,nextDepth).clr(r,g,b)

Cellular Automaton on A Surface![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IConfig.syncDrawAndDynamics=True
IG.duration(60)
IG.open("surface13.3dm")
surf = IG.surface(0)
# put automaton as panel
unum = 50
vnum = 50
uinc=1.0/unum
vinc=1.0/vnum
automata = []
for i in range(unum) :
automata.append([])
for j in range(vnum) :
automata[i].append(MyAutomaton(IVec(i*uinc, j*vinc, 0),\
uinc, vinc, -1, surf))
#connecting adjacent automata
for i in range(unum) :
for j in range(vnum) :
if i > 0 :
automata[i][j].left = automata[i-1][j]
if i < unum-1 :
automata[i][j].right = automata[i+1][j]
if j > 0 :
automata[i][j].down = automata[i][j-1]
if j < vnum-1 :
automata[i][j].up = automata[i][j+1]
if i==0 :
automata[i][j].state = 1 # activated
surf.del()
IG.fill()
class MyAutomaton(IAgent) :
def __init__(self, pt, w, h, d, s) :
self.pos = pt
self.width = w
self.height = h
self.depth = d
self.surf = s
self.state = 0 # current state
self.lst = 0 # left state
self.rst = 0 # right state
self.dst = 0 # down state
self.ust = 0 # up state
self.box = None
self.left = None # left automaton
self.right = None # right automaton
self.up = None # up automaton
self.down = None # down automaton
def interact(self, agents) :
# reset states
self.lst=self.rst=self.dst=self.ust=0
if self.left is not None :
self.lst = self.left.state
if self.right is not None :
self.rst = self.right.state
if self.down is not None :
self.dst = self.down.state
if self.up is not None :
self.ust = self.up.state
def update(self) :
if self.state==0 and self.box is not None :
self.box.del()
self.box = None
elif self.state==1 and self.box is None :
boxPts = [[[ self.surf.pt(self.pos.x(), self.pos.y()),\
self.surf.pt(self.pos.x(), self.pos.y(), self.depth) ],\
[ self.surf.pt(self.pos.x(), self.pos.y()+self.height),\
self.surf.pt(self.pos.x(), self.pos.y()+self.height, self.depth) ]],\
[[ self.surf.pt(self.pos.x()+self.width, self.pos.y()),\
self.surf.pt(self.pos.x()+self.width, self.pos.y(), self.depth) ],\
[ self.surf.pt(self.pos.x()+self.width, self.pos.y()+self.height),\
self.surf.pt(self.pos.x()+self.width, self.pos.y()+self.height, self.depth)]]]
self.box = IBox(boxPts)
# automaton update rule table
if self.lst==0 and self.rst==0 and self.dst==0 and self.ust==0 :
self.state=0
elif self.lst==1 and self.rst==0 and self.dst==0 and self.ust==0 :
self.state=1
elif self.lst==0 and self.rst==1 and self.dst==0 and self.ust==0 :
self.state=1
elif self.lst==1 and self.rst==1 and self.dst==0 and self.ust==0 :
self.state=1
elif self.lst==0 and self.rst==0 and self.dst==1 and self.ust==0 :
self.state=1
elif self.lst==1 and self.rst==0 and self.dst==1 and self.ust==0 :
self.state=0
elif self.lst==0 and self.rst==1 and self.dst==1 and self.ust==0 :
self.state=0
elif self.lst==1 and self.rst==1 and self.dst==1 and self.ust==0 :
self.state=0
elif self.lst==0 and self.rst==0 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==1 and self.rst==0 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==0 and self.rst==1 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==1 and self.rst==1 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==0 and self.rst==0 and self.dst==1 and self.ust==1 :
self.state=0
elif self.lst==1 and self.rst==0 and self.dst==1 and self.ust==1 :
self.state=1
elif self.lst==0 and self.rst==1 and self.dst==1 and self.ust==1 :
self.state=1
elif self.lst==1 and self.rst==1 and self.dst==1 and self.ust==1 :
self.state=0

The code above had interact method with the longer version of interact(ArrayList< IDynamics >). This is because the state variables of lst, rst, dst, ust are updated only once at the whole system update process. If you use interact(IDynamics), they are updated unnecessarily as many as the number of total agents in the system.
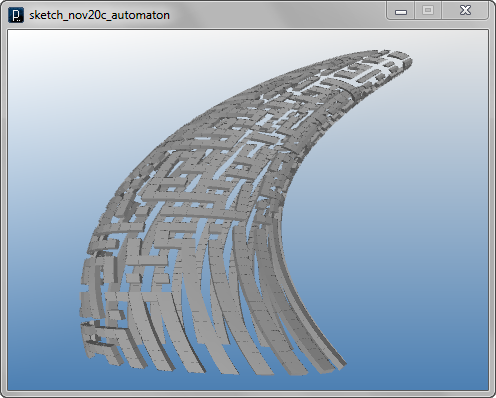
The code below shows an example to put diferent type of geometries on an automaton from a box. When the state of the automaton is 0, it puts simple rectangular panel, but when the state is 1, it puts a surface with an aperture whose size and depth corresponds the time length of the state being 1, by the integer variable count.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IConfig.syncDrawAndDynamics=True
IG.duration(60)
IG.open("surface13.3dm")
surf = IG.surface(0)
# put automaton as panel
unum = 50
vnum = 50
uinc=1.0/unum
vinc=1.0/vnum
automata = []
for i in range(unum) :
automata.append([])
for j in range(vnum) :
automata[i].append(MyAutomaton(IVec(i*uinc, j*vinc, 0),\
uinc, vinc, 1, surf))
#connecting adjacent automata
for i in range(unum) :
for j in range(vnum) :
if i > 0 :
automata[i][j].left = automata[i-1][j]
if i < unum-1 :
automata[i][j].right = automata[i+1][j]
if j > 0 :
automata[i][j].down = automata[i][j-1]
if j < vnum-1 :
automata[i][j].up = automata[i][j+1]
if i==0 :
automata[i][j].state = 1 # activated
surf.del()
IG.fill()
class MyAutomaton(IAgent) :
def __init__(self, pt, w, h, d, s) :
self.pos = pt
self.width = w
self.height = h
self.depth = d
self.surf = s
self.state = 0 # current state
self.lst = 0 # left state
self.rst = 0 # right state
self.dst = 0 # down state
self.ust = 0 # up state
self.panelSurf = None
self.left = None # left automaton
self.right = None # right automaton
self.up = None # up automaton
self.down = None # down automaton
self.count = 0
def interact(self, agents) :
# reset states
self.lst=self.rst=self.dst=self.ust=0
if self.left is not None :
self.lst = self.left.state
if self.right is not None :
self.rst = self.right.state
if self.down is not None :
self.dst = self.down.state
if self.up is not None :
self.ust = self.up.state
def update(self) :
prevState = self.state
# automaton update rule table
if self.lst==0 and self.rst==0 and self.dst==0 and self.ust==0 :
self.state=0
elif self.lst==1 and self.rst==0 and self.dst==0 and self.ust==0 :
self.state=1
elif self.lst==0 and self.rst==1 and self.dst==0 and self.ust==0 :
self.state=1
elif self.lst==1 and self.rst==1 and self.dst==0 and self.ust==0 :
self.state=1
elif self.lst==0 and self.rst==0 and self.dst==1 and self.ust==0 :
self.state=1
elif self.lst==1 and self.rst==0 and self.dst==1 and self.ust==0 :
self.state=0
elif self.lst==0 and self.rst==1 and self.dst==1 and self.ust==0 :
self.state=0
elif self.lst==1 and self.rst==1 and self.dst==1 and self.ust==0 :
self.state=0
elif self.lst==0 and self.rst==0 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==1 and self.rst==0 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==0 and self.rst==1 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==1 and self.rst==1 and self.dst==0 and self.ust==1 :
self.state=0
elif self.lst==0 and self.rst==0 and self.dst==1 and self.ust==1 :
self.state=0
elif self.lst==1 and self.rst==0 and self.dst==1 and self.ust==1 :
self.state=1
elif self.lst==0 and self.rst==1 and self.dst==1 and self.ust==1 :
self.state=1
elif self.lst==1 and self.rst==1 and self.dst==1 and self.ust==1 :
self.state=0
if self.state != prevState : # state change
if self.panelSurf is not None :
self.panelSurf.del()
if self.state==0 :
# just rectangular panel
panelPts = [[ self.surf.pt(self.pos.x(), self.pos.y()),
self.surf.pt(self.pos.x(), self.pos.y()+self.height) ],
[ self.surf.pt(self.pos.x()+self.width, self.pos.y()),
self.surf.pt(self.pos.x()+self.width, self.pos.y()+self.height) ]]
self.panelSurf = ISurface(panelPts).clr(self.count*0.02)
elif self.state==1 :
#3 by 4 control points
panelPts = []
panelPts.append([])
panelPts.append([])
panelPts.append([])
#rectangular border
panelPts[0].append(self.surf.pt(self.pos.x(), self.pos.y()))
panelPts[0].append(self.surf.pt(self.pos.x()+self.width, self.pos.y()))
panelPts[0].append(self.surf.pt(self.pos.x()+self.width, self.pos.y()+self.height))
panelPts[0].append(self.surf.pt(self.pos.x(), self.pos.y()+self.height))
#rotated central opening
angle = self.count*PI*0.0025
factor = self.count*0.015
center = self.surf.pt(self.pos.x()+self.width/2, self.pos.y()+self.height/2)
nml = self.surf.nml(self.pos.x()+self.width/2, self.pos.y()+self.height/2)
panelPts[1].append(panelPts[0][0].dup().scale(center,factor).rot(center,nml,angle))
panelPts[1].append(panelPts[0][1].dup().scale(center,factor).rot(center,nml,angle))
panelPts[1].append(panelPts[0][2].dup().scale(center,factor).rot(center,nml,angle))
panelPts[1].append(panelPts[0][3].dup().scale(center,factor).rot(center,nml,angle))
#rotated and pushed central opening
shift = nml.dup().len(self.depth*self.count*0.02)
panelPts[2].append(panelPts[1][0].dup().add(shift).rot(center,nml,angle))
panelPts[2].append(panelPts[1][1].dup().add(shift).rot(center,nml,angle))
panelPts[2].append(panelPts[1][2].dup().add(shift).rot(center,nml,angle))
panelPts[2].append(panelPts[1][3].dup().add(shift).rot(center,nml,angle))
# u degree 1, v degree 2, closed in u, open in v
self.panelSurf = ISurface(panelPts,2,1,False,True).clr(self.count*0.02)
if self.state > 0 :
self.count += 1 # count time of state being positive


HOME
FOR PROCESSING
DOWNLOAD
DOCUMENTS
TUTORIALS (Java /
Python)
GALLERY
SOURCE CODE(GitHub)
PRIVACY POLICY
ABOUT/CONTACT
