
 Python Tutorials Python Tutorials | (back to the list of tutorials) |
 Position, Velocity, Acceleration and Force
Position, Velocity, Acceleration and Force
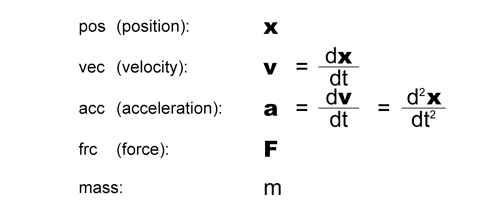
Then a force, a mass and an acceleration are related by this equation of Newton's laws of motion, and therefore a velocity and a position are also related through derivation with respect to time.

To implement a particle with motion behavior following Newton's laws, you'd start with putting fields of a position, a velocity, an acceleration, a force and a mass in an agent class. The type of variable of mass is scalar (double) and others are vectors (IVec). Because a mass of an object usually doesn't change, the variable of a mass can be seen as a constant value and is initialized at the declaration of the variable. Usually in simulation of motion, an object is initialized with an initial position and velocity, and the constructor of the class takes two input vectors to initialize the instance's position and velocity.
![]()
![]()
![]()
add_library('igeo')
class MyParticle(IAgent) :
def __init__(self, p, v) :
self.pos = p
self.vel = v
self.mass = 1.0
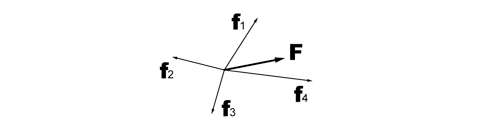
Whereas a position and a velocity are internal states of an object, a force is something which can be applied to the object from the outside of the object. In each time frame, a force is applied to the object and updates its velocity and position. An object could receive multiple vector forces and those forces are calculated into a resultant force vector as described in the following formula.

A resultant vector is shown graphically below and it's just a summation vector of all received vectors in one time frame.
To have the mechanism to receive multiple forces, from the outside of the class or the inside, push() method is defined as the following.
![]()
![]()
![]()
add_library('igeo')
class MyParticle(IAgent) :
def __init__(self, p, v) :
self.pos = p
self.vel = v
self.mass = 1.0
self.frc = IVec()
def push(self, f) :
self.frc.add(f)
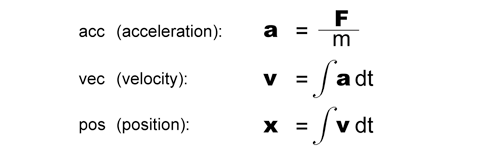
To update an object's acceleration, velocity and position, you only need to use the resultant force vector, not each individual force vector, because the equations in Newton's laws are all linear-independent. According to the Newton's laws and the definition of an acceleration and a velocity, the agent's acceleration, velocity and position can be calculated as the following.
Implementing Particle Class![]()
![]()
![]()
add_library('igeo')
class MyParticle(IAgent) :
dt = IConfig.updateRate; #static variable, second per frame
def __init__(self, p, v) :
self.pos = p
self.vel = v
self.mass = 1.0
self.frc = IVec()
def push(self, f) :
self.frc.add(f)
def update(self) :
acc = self.frc.div(self.mass)
self.vel.add(acc.mul(MyParticle.dt))
self.pos.add(self.vel.cp().mul(MyParticle.dt)); #vel itself can't be changed
self.frc.zero() #reset frc by setting zero
The variable dt is a time in second between each time frame to update agents. It has the keyword final to use it as a constant variable and the value of the time between frames of the iGeo system is stored in IConfig.updateRate. This value is set by the method IG.updateRate(double) or its alias method IG.rate(double) or method IG.speed(double). In the update method, the acceleration (acc) is defined by dividing the force (frc) by the mass. Then the velocity (vel) is updated by adding the acceleration, which is an increment (or decrement) of velocity per unit time, multiplied by the interval time of frames (dt). In the similar way, the position (pos) is updated with the velocity, which is an increment of position per unit time, but because the value of the velocity needs to be preserved (on the other hand, the acceleration and the force don't need to be preserved because they are only for the duration of each time frame), the content of vel is copied with cp() method before multiplying dt. And then the force (frc) is reset to zero for the next time frame.
To use this particle class, you'd add the code to apply some force to it, and also to create some geometries. The following example creates one particle instance having a force to push towards negative y-direction and creating a point geometry on each time frame.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
MyParticle(IG.v(0,0,0), IG.v(10,20,0))
class MyParticle(IAgent) :
dt = IConfig.updateRate#static variable, second per frame
def __init__(self, p, v) :
self.pos = p
self.vel = v
self.mass = 1.0
self.frc = IVec()
def push(self, f) :
self.frc.add(f)
def update(self) :
self.push(IG.v(0,-10,0))
IPoint(self.pos.cp())
acc = self.frc.div(self.mass)
self.vel.add(acc.mul(MyParticle.dt))
self.pos.add(self.vel.cp().mul(MyParticle.dt)); #vel itself can't be changed
self.frc.zero() #reset frc by setting zero

To have a clearer organization of the code, the force application part and the geometry creation part can be separated from the base particle class as its child class. The following code shows MyParticleBase class as the base class and the MyParticle class as the separated child class inheriting MyParticleBase.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
MyParticle(IG.v(0,0,0), IG.v(10,20,0))
class MyParticleBase(IAgent) :
dt = IConfig.updateRate#static variable, second per frame
def __init__(self, p, v) :
self.pos = p
self.vel = v
self.mass = 1.0
self.frc = IVec()
def push(self, f) :
self.frc.add(f)
def update(self) :
acc = self.frc.div(self.mass)
self.vel.add(acc.mul(MyParticleBase.dt))
self.pos.add(self.vel.cp().mul(MyParticleBase.dt)); #vel itself can't be changed
self.frc.zero() #reset frc by setting zero
class MyParticle(MyParticleBase) :
def __init__(self, p, v) :
MyParticleBase.__init__(self,p,v)
def update(self) :
self.push(IG.v(0,-10,0))
IPoint(self.pos.cp())
MyParticleBase.update(self)
Using IParticle Class![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
MyParticle(IG.v(0,0,0), IG.v(10,20,0))
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
self.push(IG.v(0,-10,0))
IPoint(self.pos().cp())
When you inherit IParticle class,
you don't need to have a line of
super.update();
in the update method.
Here is another example of use of IParticle to define a random walk behavior by adding a random vector as force.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
MyParticle(IG.v(0,0,0), IG.v(0,0,0))
MyParticle(IG.v(0,0,0), IG.v(0,0,0))
MyParticle(IG.v(0,0,0), IG.v(0,0,0))
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
force = IRand.pt(-100,-100,0,100,100,0)
self.push(force)
IPoint(self.pos().cp())

Yet another IParticle example adding force based on the particle's velocity.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
MyParticle(IG.v(0,0,0), IG.v(10,0,0))
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
force = self.vel().cp().mul(2).rot(PI/2)
self.push(force);
IPoint(self.pos().cp())

Interaction between Particles![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
for i in range(10) :
MyParticle(IG.v(0,i*10,0), IG.v(10,0,0)).clr(0.1*i,0,0)
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
if agent is not self :
#distance threshold
if agent.dist(self) < 20 :
force = agent.pos().dif(self.pos())
force.mul(0.01)
self.push(force)
def update(self) :
IPoint(self.pos().cp()).clr(self.clr())
A particle of this particle class checks other particles if they are within a certain threshold. If so, it calculates a difference vector from the particle to another particle position as the force direction
IVec force = p.pos().dif(pos());
and adjust the intensity of the force by multiplying some number.force.mul(0.01);
Then it push itself by feeding the force vector to the push method.push(force);
As result, particles attract each other and gather closer.

If you put the rotating behavior in update method as shown in the previous section, keeping the attraction behavior in the interact method, you can see how the interaction behavior intervenes the rotation behavior as shown below.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
for i in range(10) :
MyParticle(IRand.pt(0,0,100,100), IG.v(10,0,0)).clr(IRand.clr())
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
if agent is not self :
if agent.dist(self) < 20 :
force = agent.pos().dif(self.pos())
force.mul(1.2)
self.push(force)
def update(self) :
force = self.vel().cp().mul(2).rot(PI/2)
self.push(force)
IPoint(self.pos().cp()).clr(self.clr())
The following code combines the random walk algorithm by adding a random vector as a force in the update method and the attraction algorithm in the interact method.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
for i in range(30) :
MyParticle(IRand.pt(0,0,100,100), IG.v(10,0,0)).clr(IRand.clr())
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
if agent is not self :
if(agent.dist(self) < 20) :
force = agent.pos().dif(self.pos())
force.mul(2.0)
self.push(force)
def update(self) :
force = IRand.pt(-100,-100,0,100,100,0)
self.push(force)
IPoint(self.pos().cp()).clr(self.clr())

Agent to Apply Force to Particles![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
MyParticle(IG.v(0,0,0), IG.v(10,20,0))
MyGravity()
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
IPoint(self.pos().cp())
class MyGravity(IAgent) :
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
agent.push(IG.v(0,-10,0))
The code above use simpler definition of interact method
void interact(IDynamics agent)
rather than the longer and faster definition of interact method
void interact(ArrayList< IDynamics > agents)
to keep the code simple.
The if-condition on the first line
The following code shows a small revision of the previous code. For better reusability of code, it's better to bring a variable into MyGravity class to control the force vector. The vector variable gravity is defined and initialized at the constructor of the class. Actual direction and amount of the gravity force is given at setup() method.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
MyParticle(IG.v(0,0,0), IG.v(10,20,0))
MyGravity(IG.v(0,-10,0))
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
IPoint(self.pos().cp())
class MyGravity(IAgent) :
def __init__(self, g) :
self.gravity = g
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
agent.push(self.gravity)
The example code below shows multiple particles with different initial positions and velocities reacting to one gravity agent.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
num = 40
for i in range(num) :
a = i*2*PI/num
MyParticle(IG.v(20,0,0).rot(a),IG.v(10,0,i).rot(a))
MyGravity(IG.v(0,0,-10))
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
IPoint(self.pos().cp())
class MyGravity(IAgent) :
def __init__(self, g) :
self.gravity = g
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
agent.push(self.gravity)
Agent to Bounce Particles![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
num = 40
for i in range(num) :
a = i*2*PI/num
MyParticle(IG.v(20,0,0).rot(a), IG.v(10,0,i).rot(a))
MyGravity(IG.v(0,0,-10))
BouncePlane(-5)
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
def update(self) :
IPoint(self.pos().cp())
class MyGravity(IAgent) :
def __init__(self, g) :
self.gravity = g
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
agent.push(self.gravity)
class BouncePlane(IAgent) :
def __init__(self, zval) :
self.z = zval
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
if agent.pos().z() < self.z :
agent.pos().add(0,0,self.z-agent.pos().z())
agent.vel().ref(IG.zaxis)
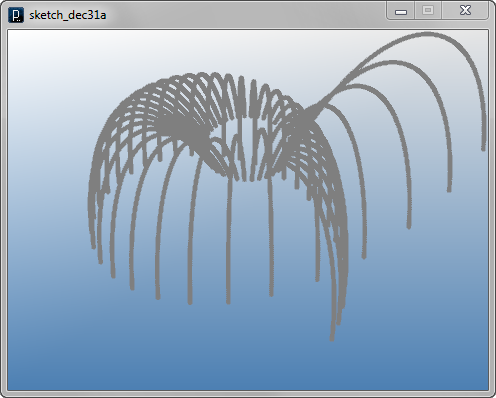
Creating Geometry on A Trace of Particles![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
num = 40
for i in range(num) :
a = i*2*PI/num
MyParticle(IG.v(20,0,0).rot(a), IG.v(10,0,i).rot(a))
MyGravity(IG.v(0,0,-10))
BouncePlane(-5)
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
self.prevPos = None
def update(self) :
curPos = self.pos().cp()
if self.prevPos is not None :
ICurve(self.prevPos, curPos).clr(0)
self.prevPos = curPos
class MyGravity(IAgent) :
def __init__(self, g) :
self.gravity = g
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
agent.push(self.gravity)
class BouncePlane(IAgent) :
def __init__(self, zval) :
self.z = zval
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
if agent.pos().z() < self.z :
agent.pos().add(0,0,self.z-agent.pos().z())
agent.vel().ref(IG.zaxis)

You might notice there is a point geometry at the latest position of the particle agent although there is no code to create a point geometry inside MyParticle class. This is a point of IParticle class to show the current position of the particle. If you don't want to show it, you can hide by the method of IParticle hide(). The example to hide the point is shown in the next code.
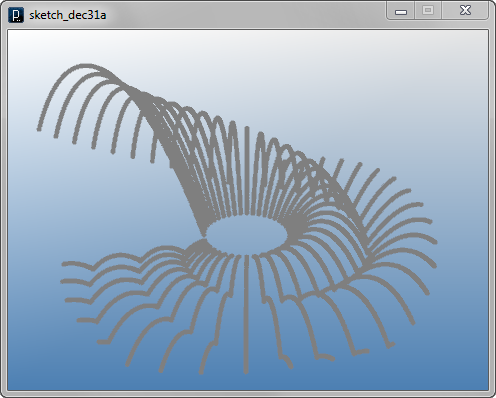
There is another way to create geometries on a trace of particles. It is to create another independent agent class just to create geometries in every time frame. The next code has the class MyGeometry class. This class has two instance fields of MyParticle, particle1 and particle2 and it creates a surface in every time frame inside the update method. The instances of MyGeometry class are initialized in the setup method by feeding adjacent two particle agents.
![]()
![]()
![]()
![]()
add_library('igeo')
def setup() :
size(480, 360, IG.GL)
IG.duration(200)
num = 40
particle = []
for i in range(num) :
a = i*2*PI/num
particle.append(MyParticle(IG.v(20,0,0).rot(a),IG.v(10,0,i).rot(a)))
for i in range(1, num) :
GeometryAgent(particle[i-1], particle[i])
MyGravity(IG.v(0,0,-10))
BouncePlane(-5)
class MyParticle(IParticle) :
def __init__(self, p, v) :
IParticle.__init__(self,p,v)
self.prevPos = None
def update(self) :
curPos = self.pos().cp()
if self.prevPos is not None :
ICurve(self.prevPos, curPos).clr(0)
self.prevPos = curPos
class MyGravity(IAgent) :
def __init__(self, g) :
self.gravity = g
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
agent.push(self.gravity)
class BouncePlane(IAgent) :
def __init__(self, zval) :
self.z = zval
def interact(self, agents) :
for agent in agents :
if isinstance(agent, MyParticle) :
if agent.pos().z() < self.z :
agent.pos().add(0,0,self.z-agent.pos().z())
agent.vel().ref(IG.zaxis)
class GeometryAgent(IAgent) :
def __init__(self, p1, p2) :
self.particle1 = p1
self.particle2 = p2
self.prevPos1 = None
self.prevPos2 = None
def update(self) :
curPos1 = self.particle1.pos().cp()
curPos2 = self.particle2.pos().cp()
if self.prevPos1 is not None and self.prevPos2 is not None :
ISurface(self.prevPos1, curPos1, curPos2, self.prevPos2).clr(self.clr())
self.prevPos1 = curPos1
self.prevPos2 = curPos2
# update color
r = self.red() + IRand.get(-0.01,0.01)
g = self.green() + IRand.get(-0.02,0.02)
self.clr(r, g, 1.0)

HOME
FOR PROCESSING
DOWNLOAD
DOCUMENTS
TUTORIALS (Java /
Python)
GALLERY
SOURCE CODE(GitHub)
PRIVACY POLICY
ABOUT/CONTACT
