
 Python Tutorials Python Tutorials | (back to the list of tutorials) |
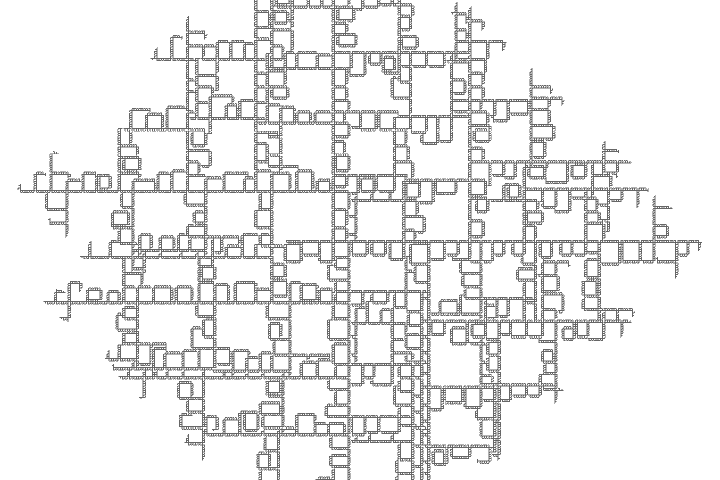
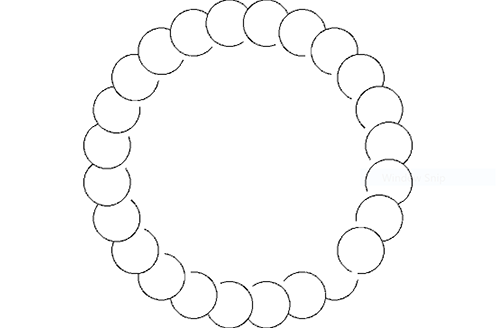
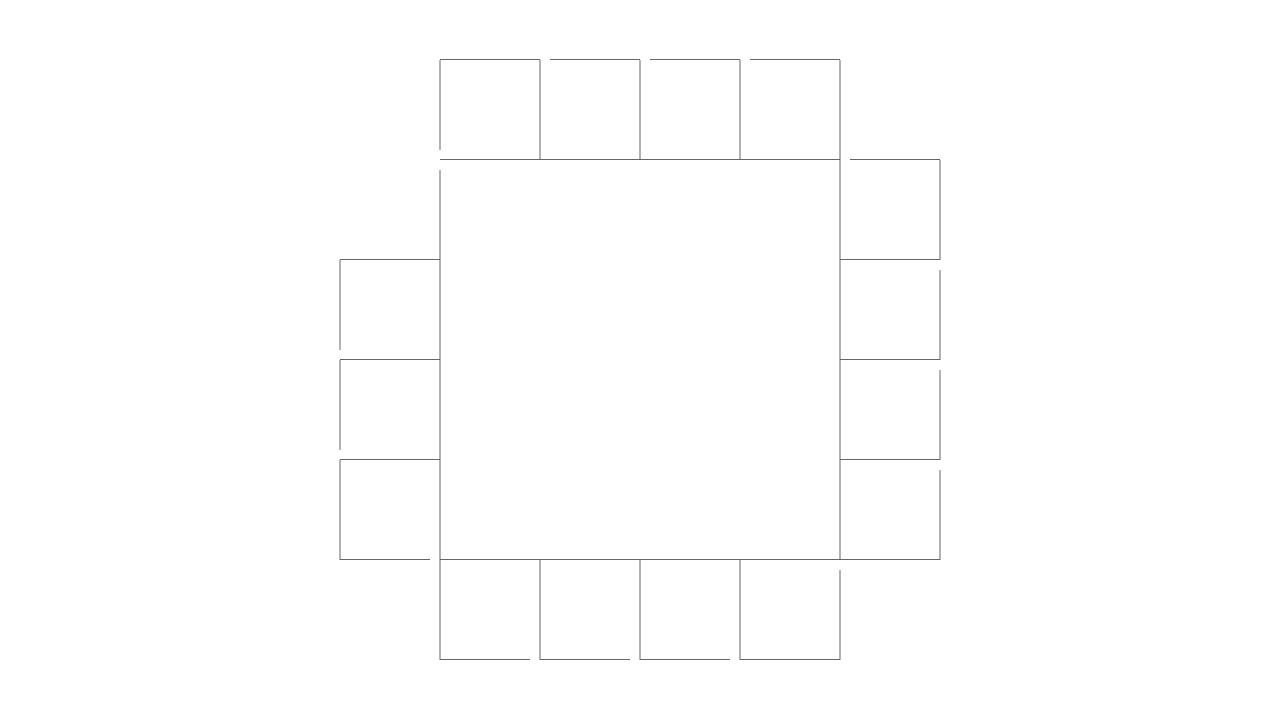
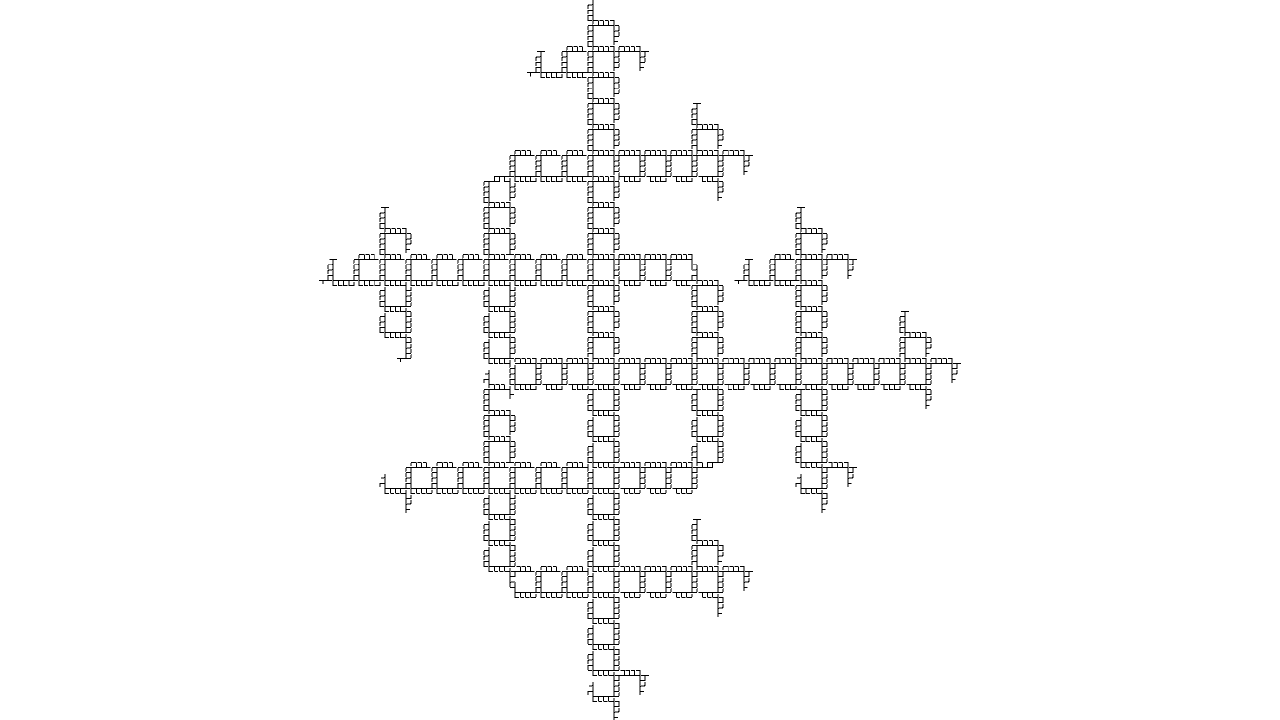
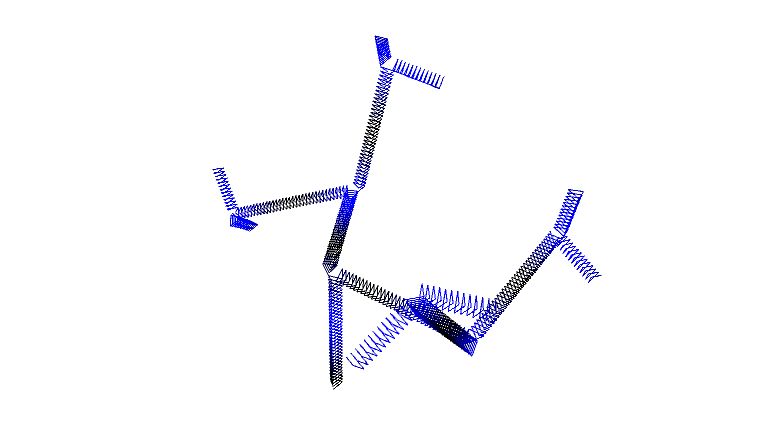
 Template Code
Template Code![]()
![]()
![]()
Warning: include(codepy/igeo_tutorial60_0/igeo_tutorial60_0.html): failed to open stream: No such file or directory in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Warning: include(): Failed opening 'codepy/igeo_tutorial60_0/igeo_tutorial60_0.html' for inclusion (include_path='.:/opt/alt/php56/usr/share/pear:/opt/alt/php56/usr/share/php') in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Rule 1![]()
![]()
![]()
void rules(){
if(clock(0)==9){
if(clock(1)==0){
next(2);
}
next(rot(PI/2), 1);
}
else{
next(0);
}
}

Rule 2![]()
![]()
![]()
void rules(){
if(clock(0)==9){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
next(rot(PI/2), 1);
}
else{ next(0); }
}
Rule 3![]()
![]()
![]()
void rules(){
if(clock(0)==9){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}

Rule 4![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4)==3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2), 5).clr(0);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}
Rule 5![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4)==3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/3), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/3), 5).clr(0);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4); //.clr(0, 0, (clock(4)+1)*0.3);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}

Rule 6![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4)==3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2), 5).clr(0);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4); //.clr(0, 0, (clock(4)+1)*0.3);
}
next(rot(PI/2), 1);
}
else{ next(rot(PI/180*1), 0); }
}

Rule 7![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4)==3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5).clr(0);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2), 5).clr(0);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4); //.clr(0, 0, (clock(4)+1)*0.3);
}
next(rot(PI/2), 1);
}
else{ next(rot(PI/180*0.1), 0); }
}
Rule 8![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==3){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4) >= IRand.getInt(2, 7)){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2), 5); //.clr(IRand.clr());
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5); //.clr(IRand.clr());
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2), 5); //.clr(IRand.clr());
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}

Rule 9![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2) >= IRand.getInt(3,10)){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4) == 3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2), 5);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}
Rule 10![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2) >= IRand.getInt(3,10)){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4) == 3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2+IRand.get(-PI/12,PI/12)), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2+IRand.get(-PI/12,PI/12)), 5);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}
Rule 11![]()
![]()
![]()
void rules(){
if(clock(0)>=IRand.getInt(3,10)){
if(clock(1)==0){
if(clock(2) >= IRand.getInt(1,5)){
next(rot(-PI/2), 3);
}
else{ next(rot(IRand.get(-0.15, 0.15)), 2); }
}
if(clock(4) == 3){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){
next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){
next(rot(-PI/2), 5);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}
Rule 12![]()
![]()
![]()
void rules(){
if(clock(0)==1){
next(rot(-PI/6), 2);
next(rot(PI/3*2), 1);
}
else{ next(0); }
}
Rule 13![]()
![]()
![]()
void rules(){
if(clock(0)==1){
next(rot(PI/3).flipNml(), 2);
next(rot(PI/3*2), 1);
}
else{ next(0); }
}
Rule 14![]()
![]()
![]()
void rules(){
if(clock(1)==0){
if(clock(0)==5){
next(rot(PI/2), 1);
}
else{ next(mul(0.99),0); }
}
else{
if(clock(0)==15){
next(rot(PI/2), 3);
}
else if(clock(0)==2){
next(rot(-PI/2).flipNml(), 2);
next(0);
}
else{ next(mul(0.99), 0); }
}
}

Rule 15![]()
![]()
![]()
void rules(){
if(clock(1)==0){
if(clock(0)==15){
next(rot(PI/3), 1);
next(rot(-PI/3), 2);
}
else{ next(mul(0.99), 0); }
}
else if(clock(1)==1){
if(clock(0)==5){
next(rot(PI/3), 1);
}
else{ next(mul(0.99), 0); }
}
else{
if(clock(0)==5){
next(rot(PI/3), 3);
}
else{ next(mul(0.99), 0); }
}
}
Rule 16![]()
![]()
![]()
void rules(){
if(clock(1)==0){
if(clock(0)==15){
next(rot(PI/3), 1);
next(rot(-PI/3), 2);
}
else{ next(0); }
}
else if(clock(1)==1){
if(clock(0)==5){
next(rot(PI/3), 1);
}
else{ next(0); }
}
else{
if(clock(0)==5){
next(rot(PI/3), 3);
}
else{ next(mul(0.99), 0); }
}
}
Rule 17![]()
![]()
![]()
void rules(){
if(clock(1)==0){
next(rot(-PI/4), 1);
next(rot(PI/2).flipNml(), 2);
}
else{
if(clock(0)==5){
if(IRand.pct(20)){
next(rot(-PI/4).flipNml(), 2);
}
}
else{ next(0); }
}
}
Rule 18![]()
![]()
![]()
void rules(){
if(clock(1)==0){
if(clock(0)==5){
next(rot(PI/2), 1);
if(clock(2)==3){
if(IRand.pct(70)) next(rot(PI/3),3);
if(IRand.pct(50)) next(3);
if(IRand.pct(30)) next(rot(-PI/2), 3);
}
else{ next(2); }
}
else{ next(0); }
}
else{
if(clock(0)==5){
next(rot(PI/2), 1);
}
else{
next(mul(0.98), 0).clr(clock(0)*0.2, 0, clock(1)*0.1);
}
}
}
Rule 19![]()
![]()
![]()
void rules(){
if(clock(1)==0){
if(clock(0)==5){
next(rot(PI/2), 1).clr(0,0.5,1.0);
if(clock(2)==0){
if(clock(3)==0){
next(rot(-PI/2), 3).clr(0,0,1.0);
}
else{ next(rot(-PI/4), 4).clr(0); }
}
}
else{ next(rot(PI/20),0); }
}
else{
if(clock(0)==10){
next(rot(PI/2),1).clr(0.5,0,1);
if(clock(2)==0){
next(3).clr(1.0,0.5,0);
}
}
else{ next(rot(PI/20),0); }
}
}
Rule 20![]()
![]()
![]()
void rules(){
if(clock(1)==0){
if(clock(0)==5){
next(rot(PI/2), 1).clr(0,0.5,1.0);
if(clock(2)==0){
if(clock(3)==0){
if(IRand.pct(90)) next(rot(-PI/4), 3).clr(0,0,1.0);
}
else{
if(IRand.pct(40)) next(rot(-PI/2), 4).clr(0);
}
}
}
else{
if(clock(2)==1){
next(mul(0.99), 0);
}
else{ next(0); }
}
}
else if(clock(1)==1){
if(clock(0)==10){
next(rot(PI/2),1).clr(0.5,0,1);
if(clock(2)==0){
next(3).clr(1.0,0.5,0);
}
}
else{
if(clock(2)==1){
next(mul(0.99), 0);
}
else{ next(0); }
}
}
else if(clock(1)==2){
if(clock(0)==5){
next(rot(PI/2), 1);
}
else{
if(clock(2)==1){
next(mul(0.99), 0);
}
else{ next(0); }
}
}
else{
if(clock(0)==10){
if(clock(2)==0){
next(rot(PI/2),2);
}
}
else{ next(mul(0.99), 0); }
}
}
Rule 21![]()
![]()
![]()
void rules(){
if(clock(4)==0){
if(clock(0)==3){
next(rot(PI/2),1);
if(clock(1)==0){
if(clock(2)==2) next(rot(-PI/2),3);
else next(2);
}
}
else{
if(clock(1)==2 && clock(0)==0) next(rot(-PI/2),4).clr(1.0,0,1.0);
next(0);
}
}
else{
if(clock(0)==15) next(rot(PI/2),5).clr(0);
else next(0);
}
}
Rule 22![]()
![]()
![]()
void rules(){
if(clock(0)==1){
if(clock(1)==1){
if(clock(2)==10){
next(rot(-PI/6), 3);
}
else{ next(rot(-PI*5/6), 2); }
}
else{
next(rot(PI*5/6), 1);
if(clock(2)==5){
next(rot(-PI/2),4);
}
}
}
else{ next(0); }
}

Rule 23![]()
![]()
![]()
void rules(){
if(clock(0)==2){
if(clock(1)==0 && clock(2)==3){
next(rot(-PI/3), 3);
}
if(clock(1)==2){
if(clock(2)==5){
next(rot(-PI/3), 4);
}
else{ next(rot(-PI/3).flipNml(), 2); }
}
next(rot(PI/3), 1);
}
else{ next(0); }
}
Rule 24![]()
![]()
![]()
void rules(){
if(clock(0)==2){
if(clock(1)==0 && clock(2) >= IRand.get(3,6)){
next(rot(-PI/3), 3);
}
if(clock(1)==2){
if(clock(2) == IRand.getInt(2,5)){
next(rot(-PI/3), 4);
}
else{ next(rot(-PI/3).flipNml(), 2); }
}
next(rot(PI/3), 1);
}
else{ next(0); }
}
Rule 25![]()
![]()
![]()
void rules(){
if(clock(6)==0){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2) >= IRand.getInt(2,10)){
next(rot(-PI/2), 3);
}
else{ next(2); }
}
if(clock(4) == 2){
if(clock(1)==2 && clock(2)==0 && clock(3)==0){ // left
if(IRand.pct(70)) next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==1){ // straight
next(rot(-PI/2), 5);
}
if(clock(1)==2 && clock(2)==0 && clock(3)==2){ // right
if(IRand.pct(70)) next(rot(-PI/2), 5);
}
}
else if(clock(1)==2 && clock(2)==0 && clock(3)==1){
next(rot(-PI/2), 4);
}
next(rot(PI/2), 1);
}
else{
if(clock(0)==2 && clock(1)==0 && clock(3)==2){
next(rot(-PI/2).mul(1), 6).clr(0.5,0,1);
}
next(0);
}
}
else{ // branch mode
if(clock(1)==60){
if(IRand.pct(10)){
next(mul(1), 7).clr(0,0,0.5);
}
}
else{
if(IRand.pct(20)){
next(rot(-PI/4), 1);
}
if(IRand.pct(20)){
next(rot(PI/4), 1);
}
if(IRand.pct(90)){
next(1);
}
}
}
}
Rule 26![]()
![]()
![]()
void rules(){
if(clock(3)==1){
if(clock(0)>=2 && IRand.pct(10)){
next(4);
}
else{ next(0); }
}
else if(clock(0)==2){
if(clock(1)==0){
next(rot(-PI/3), 3);
}
if(clock(1)==0){
next(rot(PI/3), 2);
}
else{ next(rot(PI/3), 1); }
}
else{ next(0); }
}
Rule 27![]()
![]()
![]()
void rules(){
if(clock(3)==1){
if(clock(0)>=2){
next(4);
}
else{ next(rot(0.05), 0); }
}
else if(clock(0)==2){
if(clock(1)==0){
next(rot(-PI/3), 3);
}
if(clock(1)==0){
next(rot(PI/3), 2);
}
else{ next(rot(PI/3), 1); }
}
else{ next(0); }
}
Rule 28![]()
![]()
![]()
void rules(){
// corrugate
if(clock(6)==0){
if(clock(3)==1){
if(clock(1)==1){
if(clock(0)==5){
if(clock(4)==12){ next(6); }
else{ next(rot(PI/2), 4); }
}
else{ next(0); }
}
else{ next(rot(-PI/2), 1); }
}
else{
if(clock(1)==1){
if(clock(0)==5){
next(rot(-PI/2), 3);
if(clock(4)==10){ next(5); }
}
else{ next(0); }
}
else{ next(rot(PI/2), 1); }
}
}
// triangles
else if(clock(6)==1){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==20){ next(rot(-PI/4), 6); }
else{ next(rot(-PI/3*2).flipNml(), 2); }
}
next(rot(PI/3*2), 1);
}
else{ next(0); }
}
// squares
else{
if(clock(0)==3){
if(clock(1)==1){
if(clock(2)==0){
if(clock(3)==4){ next(rot(-PI/2), 7); }
else{ next(rot(-PI/2),3); }
}
next(2);
}
next(rot(PI/2), 1);
}
else{ next(0); }
}
}

Rule 29![]()
![]()
![]()
void rules(){
if(clock(0)==10){
if(clock(1)==0){
if(clock(2)==0){
next(pitch(PI/2).roll(-PI/2), 2);
}
else{
next(pitch(-PI/2).roll(PI/2), 3);
}
}
if(clock(1)==20); // stop
else{
if(clock(1)==0 || clock(1)==1){
if(clock(1)==1 && clock(3)==1){
next(4);
}
next(yaw(PI/2), 1).hsb(clock(1)*0.02,1,1);
}
else{
next(yaw(PI/2).mul(0.9), 1).hsb(clock(1)*0.02,1,1);
}
}
}
else{ next(0); }
}
Rule 30![]()
![]()
![]()
void rules(){
if(clock(0)==10){
if(clock(1)==0){
if(clock(2)==0){
if(clock(3)==2){
next(pitch(PI/2).roll(PI/2).mul(0.9), 2);
next(yaw(-PI/2), 4); // new cube
}
else{
next(pitch(PI/2).roll(PI/2), 2);
if(clock(4)==4 && clock(3)==1){
next(yaw(-PI/2), 5); // new cube
}
}
}
else{
next(pitch(-PI/2).roll(-PI/2), 3);
}
}
if(clock(1)==20); // stop
else{
next(yaw(PI/2).mul(0.9), 1).hsb(clock(1)*0.02,1,1);
}
}
else{ next(0); }
}
Rule 31![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==0){
if(clock(3)>=IRand.get(5,10)){
next(yaw(-PI/2), 4).hsb(sin(IG.time()*.02)*.1+.7,1,1);
if(IRand.pct(70)) next(4).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
else if(IRand.pct(97)) next(3).hsb(sin(IG.time()*.02)*.1+.7,1,1);
next(pitch(PI/2).roll(PI/2), 2).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
else if(clock(2)==1){
if(clock(3)>=IRand.get(5,10)){
if(IRand.pct(70)) next(roll(-PI/2), 4).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
next(pitch(-PI/2).roll(PI/2), 2).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
else if(clock(2)==2){
next(pitch(PI/2).roll(PI/2), 2).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
else if(clock(2)==3){
next(pitch(-PI/2).roll(PI/2), 2).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
}
next(yaw(PI/2),1).hsb(sin(IG.time()*.02)*.1+.7,1,1);
}
else{ next(0).hsb(sin(IG.time()*.02)*.1+.7,1,1); }
}

Rule 32![]()
![]()
![]()
void rules(){
if(clock(0)==3){
if(clock(1)==0){
if(clock(2)==0){
if(clock(3)>=IRand.get(5,10)){
next(rot(-PI/2), 4).hsb(sin(IG.time()*.02)*.1,1,1);
if(IRand.pct(50)) next(4).hsb(sin(IG.time()*.02)*.1,1,1);
}
else next(3).hsb(sin(IG.time()*.02)*.1,1,1);
next(roll(PI/2).yaw(PI/2), 2).hsb(sin(IG.time()*.02)*.1,1,1);
}
else if(clock(2)==1){
if(clock(3)>=IRand.get(5,10)){
if(IRand.pct(10)) next(roll(-PI/2), 4).hsb(sin(IG.time()*.02)*.1,1,1);
}
next(roll(-PI/2).yaw(PI/2), 2).hsb(sin(IG.time()*.02)*.1,1,1);
}
else if(clock(2)==2){
next(roll(PI/2).yaw(PI/2), 2).hsb(sin(IG.time()*.02)*.1,1,1);
}
else if(clock(2)==3){
next(roll(-PI/2).yaw(PI/2), 2).hsb(sin(IG.time()*.02)*.1,1,1);
}
}
next(rot(PI/2),1).hsb(sin(IG.time()*.02)*.1,1,1);
}
else{ next(pitch(-0.03).yaw(0.03), 0).hsb(sin(IG.time()*.02)*.1,1,1); }
}

Rule 33![]()
![]()
![]()
void rules(){
if(clock(0)==99){
next(pitch(PI/2).roll(PI/2), 1).clr(0,0,.5-cos(IG.time()*.05)*.5);
}
if(clock(0)==100){
next(pitch(PI/3).roll(PI/2), 1).clr(0,0,.5-cos(IG.time()*.05)*.5);
}
next(yaw(PI/3*2).pitch(0.1), 0).clr(0,0,.5-cos(IG.time()*.05)*.5);
}
Rule 34![]()
![]()
![]()
void rules(){
if(clock(0)==99){
next(pitch(PI/2).roll(PI/2), 1);
}
if(clock(0)==100){
next(pitch(PI/3).roll(PI/2), 1);
}
if(clock(0)%3==0){
next(roll(0.1).yaw(PI/3*2).pitch(0.1), 0).clr(clock(0)*0.01,0,clock(1)*0.1);
}
else{
next(yaw(PI/3*2).pitch(0.1), 0).clr(clock(0)*0.01,0,clock(1)*0.1);
}
}
Rule 35![]()
![]()
![]()
void rules(){
if(clock(5)==1){
if(clock(0)==6){
next(rot(PI/3).flipNml(),6);
}
else{ next(rot(PI/3).flipNml(),0); }
}
else{
if(clock(0)==0){
if(clock(4)==43 && clock(1)==1 && clock(2)==0){
next(rot(PI/3),5);
}
else{
if(clock(1)==2){
if(clock(2)==1){
if(clock(3)==11){
next(yaw(PI/3-PI/15).pitch(PI/6).roll(PI/6), 4);
}
else{ next(yaw(PI/3).pitch(PI/6).roll(PI/6), 3); }
}
else{ next(yaw(PI/3).pitch(PI/6), 2); }
}
else{ next(yaw(PI/3),1); }
}
}
else{ next(0); }
}
}

Rule 36![]()
![]()
![]()
void rules(){
if(clock(7)==2){ // stop
return;
}
if(clock(2)==0){ // segment
next(rot(PI/2), 2);
}
else{ // square
if(clock(0)==3){
if(clock(1)==2){
if(clock(3)==3 && clock(5)==0){
next(4);
}
else if(clock(3)==9 && clock(5)==1){
next(6).clr(0);
}
else{ next(rot(PI/2), 3); }
}
next(rot(-PI/2),1);
}
else{
if(clock(0)==1 && clock(1)==1 && clock(3)==1 && clock(5)==0){
if(clock(6)==1){
next(yaw(PI/2).pitch(PI/2), 7);
}
else{ next(rot(PI/2), 5).clr(0.5,0,0.5); }
}
next(0);
}
}
}
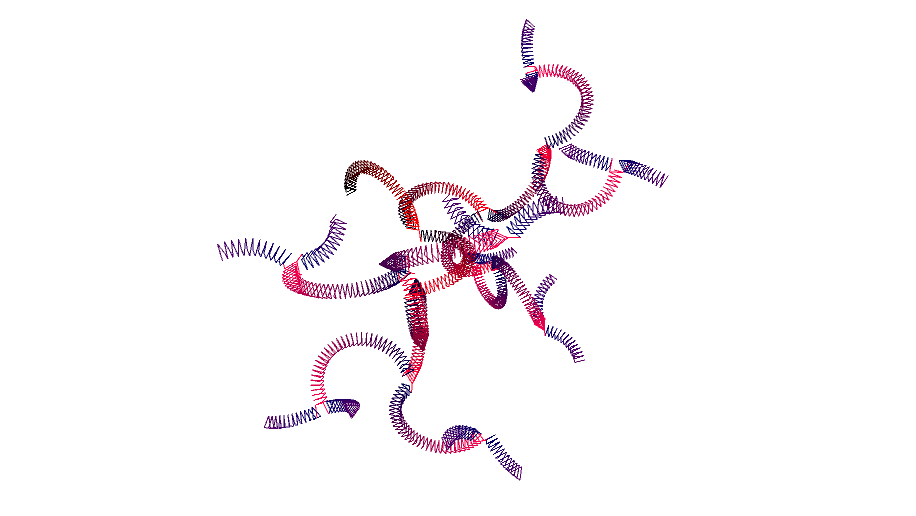
Template Code2![]()
![]()
![]()
Warning: include(codepy/igeo_tutorial60_37/igeo_tutorial60_37.html): failed to open stream: No such file or directory in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Warning: include(): Failed opening 'codepy/igeo_tutorial60_37/igeo_tutorial60_37.html' for inclusion (include_path='.:/opt/alt/php56/usr/share/pear:/opt/alt/php56/usr/share/php') in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Rule 37![]()
![]()
![]()
void setup(){
size(640, 480, IG.GL);
IConfig.syncDrawAndDynamics=true;
IG.bg(1.0);
new ClockStackAgent(new IVec(0,0,0), new IVec(0,0,10), new IVec(0,-1,0), null, null).clr(0.2);
}
//...
void rules(){
double rinc = 0.002;
double ginc = 0.02;
double ginc2 = 0.05;
double binc = 0.004;
if(clock(2)==1){
next(pitch(-PI/70), 0).clr(red(),green(),blue()+binc);
}
else if(clock(3)==1){
next(pitch(-PI/96).rot(-PI/96).roll(PI/6000), 0).clr(red(),green(),blue()+binc);
}
else if(clock(4)==1){
next(pitch(-PI*0.01475), 0).clr(red(),green(),blue()+binc);
}
else if(clock(5)==1){
next(rot(-PI*0.01545), 0).clr(red(),green(),blue()+binc);
}
else if(clock(6)==1){
if(clock(0)==5) next(pitch(-PI/4-PI/10), 1).clr(red(),green()+ginc,blue());
else next(pitch(PI/20), 0).clr(red(),green(),blue()+binc);
}
else if(clock(7)==1){
next(pitch(-PI/58), 0).clr(red(),green(),blue()+binc);
}
else if(clock(8)==1){
if(clock(0)==5) next(rot(PI/4).pitch(-PI/58), 1).clr(red(),green()+ginc,blue());
else next(rot(-PI/20).pitch(-PI/58), 0).clr(red(),green(),blue()+binc);
}
else if(clock(9)==1){
if(clock(1)==0){
if(clock(0)==15) next(1).clr(red(),green(),blue()+binc*2);
else next(0).delay(0).clr(red(),green(),blue()+binc*2);
}
else{
next(pitch(-PI/35).mul(0.99), 0).clr(red(),green(),blue()+binc*2);
}
next(rot(PI/2), 10).clr(red(),green()+ginc,blue()).clr(red(),green()+ginc2,blue());
next(rot(-PI/2), 10).clr(red(),green()+ginc,blue()).clr(red(),green()+ginc2,blue());
}
else if(clock(10)==1){
if(clock(1)==0){
next(pitch(-PI/2), 1).clr(red(),green()+ginc,blue());
}
else if(clock(1)==1){
if(clock(0)==4) next(1);
else next(0).clr(red(),green(),blue()+binc);
}
}
else{
if(clock(1)==0){
if(clock(0)==2){ next(pitch(-PI/4), 1).clr(red(),green()+ginc,blue()); }
else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120), 2).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==1){
if(clock(0)==8) next(pitch(PI/4), 1).clr(red(),green()+ginc,blue());
else next(mul(0.97),0).clr(red()+rinc,green(),blue());
next(rot(PI/2-PI/192).pitch(-PI/192), 3).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==2){
if(clock(0)==2){
next(pitch(-PI/2), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI*0.01475/2), 4).clr(red(),green()+ginc2,blue());
}
else if(clock(0)==3){
next(pitch(PI/2).mul(1.114), 1).clr(red(),green()+ginc,blue());
next(mul(0.954), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2-PI*0.01545/2), 5).clr(red(),green()+ginc2,blue());
}
else if(clock(0)==4){
next(rot(PI/2-PI*0.01545/2), 5).clr(red(),green()+ginc2,blue());
}
else{
next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI*0.01475/2), 4).clr(red(),green()+ginc2,blue());
}
}
else if(clock(1)==3){
if(clock(0)==200) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/6-PI/120), 6).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==4){
if(clock(0)==7) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120), 7).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==5){
next(1).clr(red(),green()+ginc,blue());
}
else if(clock(1)==6){
if(clock(0)==6) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120).rot(PI/8), 8).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==7){
if(clock(0)==4){
next(pitch(-PI/2), 1).clr(red(),green()+ginc,blue());
}
else next(0).clr(red()+rinc,green(),blue());
}
else if(clock(1)==8){
if(clock(0)<35) next(0).clr(red(),green()+ginc,blue());
next(rot(PI/2).mul(1+0.08*cos(2*PI*clock(0)/35)), 9).clr(red(),green()+ginc2,blue());
next(rot(-PI/2).mul(1+0.08*cos(2*PI*clock(0)/35)), 9).delay(25).clr(red(),green()+ginc2,blue());
}
}
}
Rule 38![]()
![]()
![]()
void setup(){
size(640, 480, IG.GL);
IConfig.syncDrawAndDynamics=true;
IG.bg(1.0);
new ClockStackAgent(new IVec(0,0,0), new IVec(0,0,10), new IVec(0,-1,0), null, null).clr(0.2);
}
//...
void rules(){
double rinc = 0.002;
double ginc = 0.02;
double ginc2 = 0.05;
double binc = 0.004;
if(clock(2)==1){
next(pitch(-PI/70).mul(1.0003), 0).clr(red(),green(),blue()+binc);
}
else if(clock(3)==1){
next(pitch(-PI/96).rot(-PI/96).roll(PI/6000*0).mul(1.0003), 0).clr(red(),green(),blue()+binc);
}
else if(clock(4)==1){
next(pitch(-PI*0.01475), 0).clr(red(),green(),blue()+binc);
}
else if(clock(5)==1){
next(rot(-PI*0.01545), 0).clr(red(),green(),blue()+binc);
}
else if(clock(6)==1){
if(clock(0)==5) next(pitch(-PI/4-PI/10), 1).clr(red(),green()+ginc,blue());
else next(pitch(PI/20).mul(1.002), 0).clr(red(),green(),blue()+binc);
}
else if(clock(7)==1){
next(pitch(-PI/58), 0).clr(red(),green(),blue()+binc);
}
else if(clock(8)==1){
if(clock(0)==5) next(rot(PI/4).pitch(-PI/58), 1).clr(red(),green()+ginc,blue());
else next(rot(-PI/20).pitch(-PI/58), 0).clr(red(),green(),blue()+binc);
}
else if(clock(9)==1){
if(clock(1)==0){
if(clock(0)==15) next(1).clr(red(),green(),blue()+binc*2);
else next(pitch(PI*0.01).mul(1.01), 0).delay(0).clr(red(),green(),blue()+binc*2);
}
else{
next(pitch(-PI/35).mul(0.99), 0).clr(red(),green(),blue()+binc*2);
}
next(rot(PI/2), 10).clr(red(),green()+ginc,blue()).clr(red(),green()+ginc2,blue());
next(rot(-PI/2), 10).clr(red(),green()+ginc,blue()).clr(red(),green()+ginc2,blue());
}
else if(clock(10)==1){
if(clock(1)==0){
next(pitch(-PI/2), 1).clr(red(),green()+ginc,blue());
}
else if(clock(1)==1){
if(clock(0)==4) next(1);
else next(0).clr(red(),green(),blue()+binc);
}
}
else{
if(clock(1)==0){
if(clock(0)==2){ next(pitch(-PI/4), 1).clr(red(),green()+ginc,blue()); }
else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120), 2).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==1){
if(clock(0)==8) next(pitch(PI/4), 1).clr(red(),green()+ginc,blue());
else next(mul(0.97),0).clr(red()+rinc,green(),blue());
next(rot(PI/2-PI/192).pitch(-PI/192), 3).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==2){
if(clock(0)==2){
next(pitch(-PI/2), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI*0.01475/2), 4).clr(red(),green()+ginc2,blue());
}
else if(clock(0)==3){
next(pitch(PI/2-PI*0.05).mul(1.114), 1).clr(red(),green()+ginc,blue());
next(mul(0.954), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2-PI*0.01545/2), 5).clr(red(),green()+ginc2,blue());
}
else if(clock(0)==4){
next(rot(PI/2-PI*0.01545/2), 5).clr(red(),green()+ginc2,blue());
}
else{
next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI*0.01475/2), 4).clr(red(),green()+ginc2,blue());
}
}
else if(clock(1)==3){
if(clock(0)==200) next(1).clr(red(),green()+ginc,blue());
else next(pitch(PI*0.001).mul(0.998), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/6-PI/120), 6).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==4){
if(clock(0)==7) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120), 7).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==5){
next(1).clr(red(),green()+ginc,blue());
}
else if(clock(1)==6){
if(clock(0)==6) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120).rot(PI/8), 8).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==7){
if(clock(0)==4){
next(pitch(-PI/2), 1).clr(red(),green()+ginc,blue());
}
else next(0).clr(red()+rinc,green(),blue());
}
else if(clock(1)==8){
if(clock(0)<200) next(pitch(PI*0.015).mul(0.995), 0).clr(red(),green()+ginc,blue());
next(rot(PI/2).mul(1+0.08*cos(2*PI*clock(0)/35)), 9).clr(red(),green()+ginc2,blue());
next(rot(-PI/2).mul(1+0.08*cos(2*PI*clock(0)/35)), 9).delay(25).clr(red(),green()+ginc2,blue());
}
}
}
Rule 39![]()
![]()
![]()
void setup(){
size(640, 480, IG.GL);
IConfig.syncDrawAndDynamics=true;
IG.bg(1.0);
new ClockStackAgent(new IVec(0,0,0), new IVec(0,0,10), new IVec(0,-1,0), null, null).clr(0.2);
}
//...
void rules(){
double rinc = 0.002;
double ginc = 0.02;
double ginc2 = 0.05;
double binc = 0.004;
if(clock(2)==1){
next(pitch(-PI/70), 0).clr(red(),green(),blue()+binc);
}
else if(clock(3)==1){
next(pitch(-PI/96).rot(-PI/96).roll(PI/6000), 0).clr(red(),green(),blue()+binc);
}
else if(clock(4)==1){
next(pitch(-PI*0.01475), 0).clr(red(),green(),blue()+binc);
}
else if(clock(5)==1){
next(rot(-PI*0.01545), 0).clr(red(),green(),blue()+binc);
}
else if(clock(6)==1){
if(clock(0)==5){
next(pitch(-PI/4-PI/10), 1).clr(red(),green()+ginc,blue());
if(clock(1)%5==0){
if(IRand.pct(1)){
next(pitch(PI/2).mul(0.5), 1).clr(red(),green()+ginc,blue());
}
else if(IRand.pct(1)){
next(rot(PI/2).mul(0.5), 12).clr(red(),green()+ginc,blue());
}
else if(IRand.pct(1)){
next(rot(-PI/2).mul(0.5), 12).clr(red(),green()+ginc,blue());
}
else if(IRand.pct(0.5)){
next(mul(0.5), 11).clr(red(),green()+ginc,blue());
}
}
}
else next(pitch(PI/20), 0).clr(red(),green(),blue()+binc);
}
else if(clock(7)==1){
next(pitch(-PI/58), 0).clr(red(),green(),blue()+binc);
}
else if(clock(8)==1){
if(clock(0)==5) next(rot(PI/4).pitch(-PI/58), 1).clr(red(),green()+ginc,blue());
else next(rot(-PI/20).pitch(-PI/58), 0).clr(red(),green(),blue()+binc);
}
else if(clock(9)==1){
if(clock(1)==0){
if(clock(0)==15) next(1).clr(red(),green(),blue()+binc*2);
else next(0).delay(0).clr(red(),green(),blue()+binc*2);
}
else{
next(pitch(-PI/35).mul(0.99), 0).clr(red(),green(),blue()+binc*2);
}
}
else if(clock(10)==1){
if(clock(1)==0){
next(pitch(-PI/2), 1).clr(red(),green()+ginc,blue());
}
}
else if(clock(11)==1){
if(clock(0)<35) next(0).clr(red(),green()+ginc,blue());
next(rot(PI/2).mul(1+0.08*cos(2*PI*clock(0)/35)), 9).clr(red(),green()+ginc2,blue());
next(rot(-PI/2).mul(1+0.08*cos(2*PI*clock(0)/35)), 9).delay(25).clr(red(),green()+ginc2,blue());
}
else{
if(clock(1)==0){
if(clock(0)==2){ next(pitch(-PI/4), 1).clr(red(),green()+ginc,blue()); }
else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120), 2).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==1){
if(clock(0)==8) next(pitch(PI/4), 1).clr(red(),green()+ginc,blue());
else next(mul(0.97),0).clr(red()+rinc,green(),blue());
next(rot(PI/2-PI/192).pitch(-PI/192), 3).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==2){
if(clock(0)==2){
next(pitch(-PI/2), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI*0.01475/2), 4).clr(red(),green()+ginc2,blue());
}
else if(clock(0)==3){
next(pitch(PI/2).mul(1.114), 1).clr(red(),green()+ginc,blue());
next(mul(0.954), 0).clr(red()+rinc,green(),blue());
next(rot(PI/2-PI*0.01545/2), 5).clr(red(),green()+ginc2,blue());
}
else if(clock(0)==4){
next(rot(PI/2-PI*0.01545/2), 5).clr(red(),green()+ginc2,blue());
}
else{
next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI*0.01475/2), 4).clr(red(),green()+ginc2,blue());
}
}
else if(clock(1)==3){
if(clock(0)>=260) next(1).clr(red(),green()+ginc,blue());
else{
next(mul(0.997), 0).clr(red()+rinc,green(),blue());
if(IRand.pct(1)){
if(IRand.pct(50)){
next(pitch(PI/4).mul(0.7), 0).clr(red()+rinc,green(),blue());
}
else{
next(pitch(-PI/4).mul(0.7), 0).clr(red()+rinc,green(),blue());
}
}
}
if(IRand.pct(80)){
next(rot(PI/2).pitch(-PI/6-PI/120), 6).clr(red(),green()+ginc2,blue());
}
else{
next(rot(PI/2).pitch(-PI/6-PI/120).mul(0.5), 6).clr(red(),green()+ginc2,blue());
}
}
else if(clock(1)==4){
if(clock(0)==7) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120), 7).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==5){
next(1).clr(red(),green()+ginc,blue());
}
else if(clock(1)==6){
if(clock(0)==6) next(1).clr(red(),green()+ginc,blue()); else next(0).clr(red()+rinc,green(),blue());
next(rot(PI/2).pitch(-PI/120).rot(PI/8), 8).clr(red(),green()+ginc2,blue());
}
else if(clock(1)==7){
if(clock(0)==4){
next(pitch(-PI/2), 11).clr(red(),green()+ginc,blue());
}
else next(0).clr(red()+rinc,green(),blue());
}
}
}

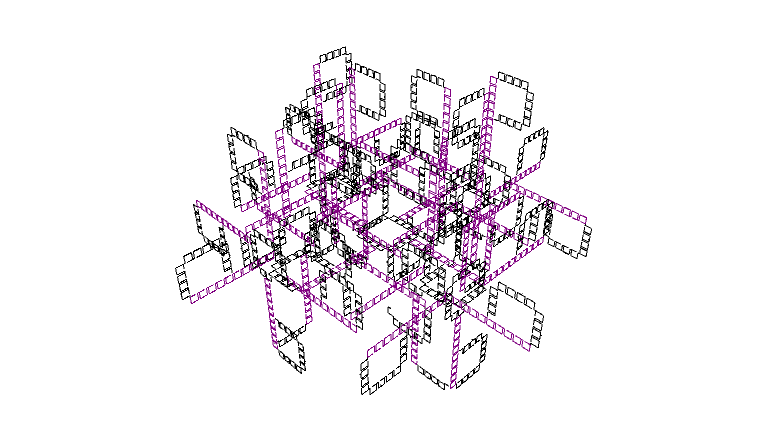
Template Code3: Imported Module Geometry![]()
![]()
![]()
Warning: include(codepy/igeo_tutorial60_41/igeo_tutorial60_41.html): failed to open stream: No such file or directory in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Warning: include(): Failed opening 'codepy/igeo_tutorial60_41/igeo_tutorial60_41.html' for inclusion (include_path='.:/opt/alt/php56/usr/share/pear:/opt/alt/php56/usr/share/php') in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66

FYI: If it is too heavy or too slow to generate module geometries in the way above, you can generate only lines which suggest the locations and orientations of modules by using "makeCSLine()" method instead of "makeModule()", and then you can place module geometries inside Rhinoceros using this python script AllocateModuleToGeometryToLine.py.
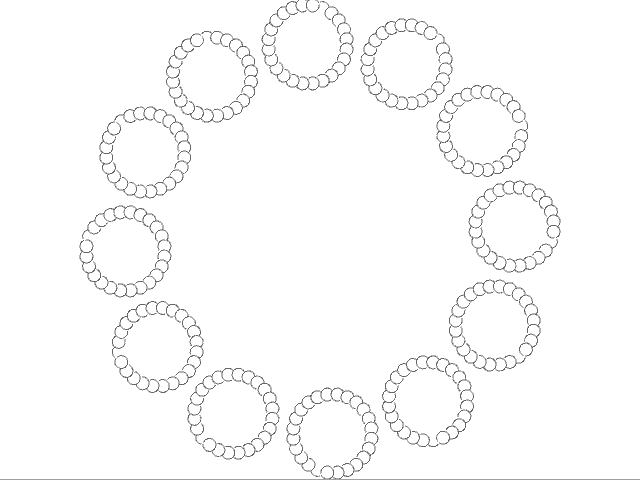
Template Code4: Module Delivdery Simulation
![]()
![]()
![]()
Warning: include(codepy/igeo_tutorial60_42/igeo_tutorial60_42.html): failed to open stream: No such file or directory in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66
Warning: include(): Failed opening 'codepy/igeo_tutorial60_42/igeo_tutorial60_42.html' for inclusion (include_path='.:/opt/alt/php56/usr/share/pear:/opt/alt/php56/usr/share/php') in /home/mj7789dybiu5/public_html/igeo/tutorial/tutorial.php on line 66

HOME
FOR PROCESSING
DOWNLOAD
DOCUMENTS
TUTORIALS (Java /
Python)
GALLERY
SOURCE CODE(GitHub)
PRIVACY POLICY
ABOUT/CONTACT
